
# **Leica Laser Scanning, Precision, and Reverse Modeling**
Leica laser scanners (usually referring to 3D laser scanners, such as the **Leica RTC360, P series, and BLK series**) use high-speed laser beams to measure the surface of an object point by point, generating high-density point cloud data. The principle is as follows:
1. **Laser Emission and Reception**
* The scanner emits a laser pulse toward the target object. The laser is reflected back upon impact.
* The instrument receives the reflected signal and records the time of flight or phase difference of the laser.
2. **Distance and Coordinate Calculation**
* Using **TOF (Time of Flight)** or **Phase-Shift**, the distance from laser emission to laser reception is calculated.
* The scanner's built-in angle encoder records the horizontal and vertical angles of the laser.
* Distance and angle are converted into **3D coordinates (X, Y, Z)** to form a point cloud.
3. **Point Cloud Stitching and Positioning**
* The data volume from a single scanning station can reach millions to hundreds of millions of points.
* Using a target sphere, a target, or a SLAM algorithm, multiple scanning stations are stitched together to create a complete spatial point cloud model.
---
## II. Accuracy and Performance
Leica laser scanners have varying accuracy depending on the model, but generally offer **high precision, wide range, and high efficiency**:
* **Ranging Accuracy**: Typically between ±1mm and ±3mm (depending on the model and environment).
* **Range**: From tens of meters (handheld BLK series) to over a thousand meters (P50 reaches >1km).
* **Scanning Speed**: Up to 1 million points/second.
* **Spatial Accuracy**: The overall error after point cloud stitching is generally controlled within ±2mm to ±5mm.
* **Environmental Compatibility**: Supports both indoor and outdoor use, with some models operating within a -20°C to +50°C temperature range.
---
## III. Reverse Modeling Process
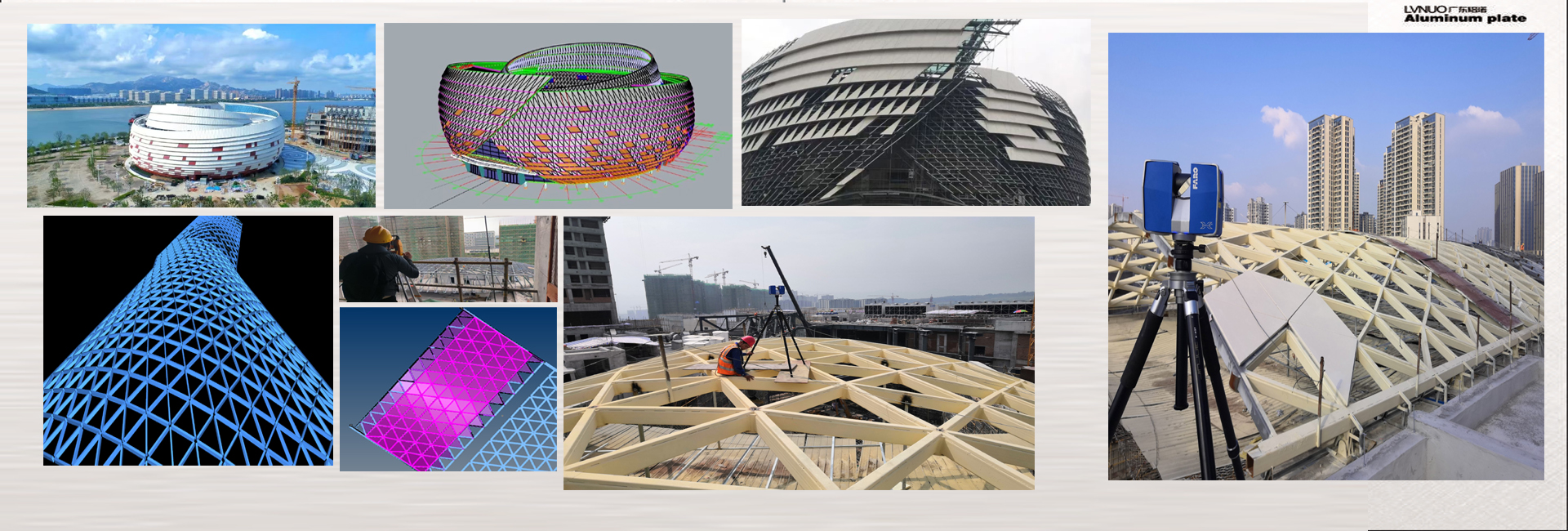
Using point cloud data acquired by Leica laser scanning, you can perform **reverse modeling** to reconstruct complex building or structural models. The process is as follows:
1. **Data Acquisition**
* Set up scanning stations on site and complete multi-angle scanning to ensure full surface coverage.
* Use target spheres or natural feature points for registration.
2. **Point Cloud Preprocessing**
* Import into software such as Cyclone and Register360 to perform **point cloud stitching, denoising, and simplification**.
* Crop regions and classify the point cloud as needed.
3. **Point Cloud Modeling**
* Import the point cloud into software such as Rhino, Revit, AutoCAD, and 3D Max.
* Use point cloud plug-ins (such as CloudCompare, Cyclone Model, and Rhino Pointools) for **surface fitting and feature extraction**.
* Reconstruct the actual structure through **NURBS surface reconstruction** or **BIM modeling**.
4. **Model Applications**
* Construction/Curtain Wall Industry: Used for curved curtain wall grid division, steel structure positioning, and construction layout.
* Industrial Manufacturing: Used for component inspection and mold reverse engineering.
* Operations and Maintenance Management: Used for digital twins and BIM operations and maintenance platforms.
